
Nuove frontiere
L’agricoltura di precisione mette il “turbo” alla produzione. Ma in Sicilia c’è tanto da fare
di Pietro Catania*
Per agricoltura di precisione (AdP) si intende l’applicazione di tecniche di gestione agronomica basate sull’osservazione e la risposta alle variazioni che esistono all’interno di aree coltivate (es.: tessitura del suolo, umidità, sostanza organica, ecc.) e le azioni mirate all’ottimizzazione delle pratiche agronomiche di gestione, rivolte alla sostenibilità avanzata (ambientale, climatica, economica, produttiva e sociale). Una definizione estesa dell’AdP può essere sintetizzata in “fare la cosa giusta, al momento giusto, nel posto giusto”.
L’AdP rappresenta, quindi, un approccio decisionale basato su informazioni di gestione aziendale progettato per migliorare la conduzione dei processi di produzione agricola. Pertanto l’AdP è in grado di fornire un approccio gestionale ottimizzato sia in termini di produzione agricola che di redditività. Oltre a ciò si deduce come, parte della redditività possa derivare dall’ottimizzazione dei fattori di produzione (macchine, manodopera, materie prime, ecc.) determinando benefici sia economici che ambientali.
L’AdP, ad oggi, in Sicilia è applicata in un numero di aziende molto limitato, mentre in Italia non supera il 2-3% delle aziende agricole. I motivi della scarsa diffusione di tale tecnica sono riconducibili alla percezione culturale, alla mancanza di competenze tecniche locali, infrastrutture e vincoli istituzionali, alle conoscenze e alle lacune tecniche e agli elevati costi di start-up, con, in alcuni casi, un rischio di insufficiente rendimento sull’investimento.
Lo sviluppo dell’agricoltura di precisione è stato reso possibile, a partire dai primi anni ’90, dalla disponibilità di un assetto tecnologico articolato in tre livelli:
1) posizionamento geografico (GPS, GLONASS, GSNN),
2) informazione geografica (GIS)
3) applicazioni (sensori – remoti o prossimali – attuatori per il dosaggio variabile, il controllo delle sezioni, i sistemi di guida, ecc.) il cui sviluppo è in continua rapida crescita.
La disponibilità di tale assetto tecnologico consente l’applicazione articolata dell’AdP che prevede quattro fasi attuative:
1) il monitoraggio di dati (ambientali, produttivi, pedologici, meccanici, ecc.),
2) l’analisi/elaborazione
3) la decisione/azione
4) il controllo
Questi quattro punti sono finalizzati alla gestione sostenibile delle risorse (fertilizzanti, sementi, prodotti fitosanitari, energia, acqua, suolo, ecc.) per mezzo del controllo delle macchine agricole che le gestiscono. Le applicazioni già da oggi disponibili, invece, sono raggruppabili, indicativamente, nei seguenti gruppi:
1) Guida assistita grazie al supporto del sistema satellitare e ad un monitor installato in cabina aiuta a mantenere traiettorie più precise rispetto alla guida totalmente manuale permettendo di ridurre le oscillazioni trasversali del veicolo (e conseguentemente le sovrapposizioni) e permettendo velocità operative più elevate.
2) Guida automatica si basa su un sistema di guida elettro-idraulica installato sul trattore o su altre tipologie di macchine semoventi agricole. Il veicolo adegua automaticamente la traiettoria ottenendo velocità più elevata e minime sovrapposizioni trasversali. La precisione di guida può essere di 2 cm utilizzando i sistemi RTK (Real Time Kinematic).
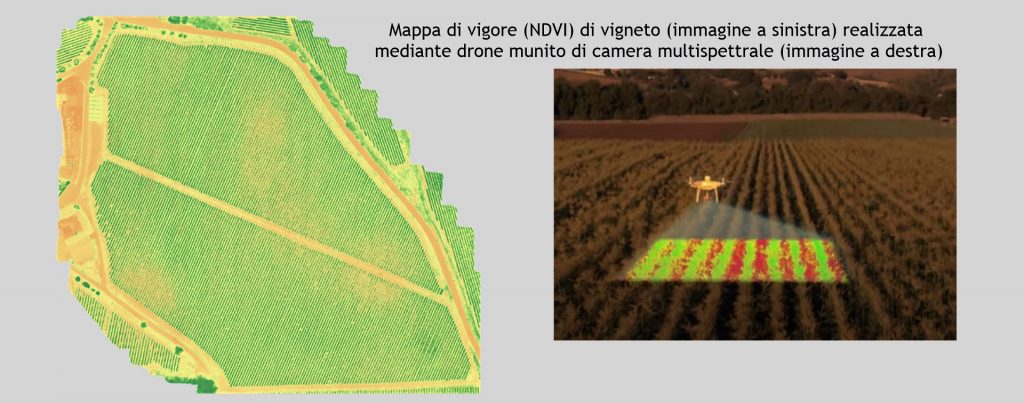
3) Dose variabile consente la distribuzione di dosi variabili di prodotto (fertilizzanti, sementi, prodotti fitosanitari) in funzione delle esigenze. Tali esigenze possono essere predeterminate e preregistrate (mappe di prescrizione) oppure misurate in tempo reale con sensori prossimali (ad es.: sensori NDVI per l’azoto). Richiede macchine operatrici (irroratrici, defogliatori, spandiconcime, spandiliquame, spandiletame, ecc.) dotate di sistemi di variazione della portata indipendenti dalla velocità.
4) Sensori remoti e prossimali consentono analisi fisiologiche sullo stato delle colture in tempo reale (ad esempio tenore in clorofilla) fornendo indicazioni all’operatore e/o input operativi alle macchine operatrici con cui dialogano (es.: NDVI, NIR, ecc.).
5) Controllo delle sezioni consente la distribuzione puntuale dei prodotti, evitando nel contempo la sovrapposizione sulla stessa area coltivata (ad es.: diserbanti, fertilizzanti, sementi) lungo i bordi degli appezzamenti o lungo le testate. Richiede macchine operatrici (barre distributrici, seminatrici, ecc.) dotate di sezioni azionabili indipendentemente.
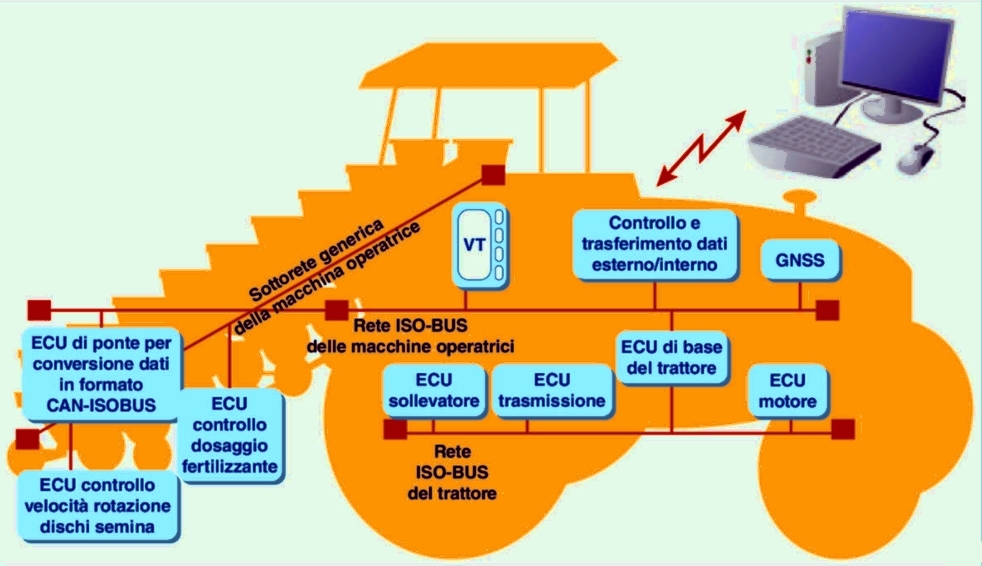
6) Isobus consente di realizzare la comunicazione di dati tra il trattore e le varie macchine operatrici. Tale controllo è personalizzabile dall’operatore, in funzione delle esigenze e riguarda l’ottimizzazione dei parametri di funzionamento delle macchine.
7) Traffico controllato riduce il passaggio “incontrollato” delle macchine sugli appezzamenti, limitando il compattamento del suolo fino all’85% selezionando percorsi preferenziali su cui tutte le macchine dei diversi cantieri verranno indirizzate.
8) Mappatura delle produzioni nelle vendemmiatrici, macchine per la raccolta delle olive, mietitrebbiatrici, e nelle trincia caricatrici attuali è possibile abbinare i sistemi di misura delle quantità caricate (produzione) con la posizione geografica in cui tali quantità sono state raccolte, permettendo di tracciare mappe di produzione, utili per definire strategie future di ottimizzazione, riducendo le eventuali differenze rilevate tra appezzamento ed appezzamento, ma anche all’interno dello stesso appezzamento.
*Professore Associato di Meccanica Agraria presso il Dipartimento di Scienze Agrarie, Alimentari e Forestali dell’Università degli Studi di Palermo
© RIPRODUZIONE RISERVATA


